




Often, it’s a bit of a struggle to understand what researchers are working on. Not in the case of Prof. Roee Diamant from the University of Haifa, whose area of expertise is underwater autonomous robots and acoustic communication.
“Our aim is to understand how many fish are in the sea,” Diamant tells ISRAEL21c. “Fish in general, but also fish that are important to farming, such as tuna and mackerel.”
Diamant continues: “We’ve developed an ability, using active sonar, to discover fish and evaluate their size and their biomass, which is the important figure when it comes to understanding the amount of fish in the sea.
“This is important for regulatory bodies in Israel, for example the Israel Nature and Parks Authority, which prohibit the fishing of certain types of fish based on this kind of data. That’s how they can know whether to prohibit fishing, and when, where and what kind of fish.”
His lab has also devised an auxiliary system to promote sustainable fishing that won a grant from the Schmidt Marine Technology Partners, a program of the Schmidt Family Foundation led by former Google CEO Eric and his wife Wendy Schmidt.

“Nowadays, fishermen usually cast their nets in the water, in areas where they think fish are meant to be, or they drag their nets along. They end up catching lots of fish that aren’t important to them, as well as sea turtles, sometimes dolphins, and little fish that are forbidden to catch. The ecological damage is very substantial,” Diamant says.
“Also, this method is less effective, because after they lift the fish out of the water, they need to throw back in whatever they weren’t intending on catching. If they had a system that would enable targeting and say, ‘You’re looking for tuna; here’s the area that you need to search,’ the fisherman could operate in a more sustainable way for the marine system.”
Robotic floats
To identify all those fish in the sea, Diamant and his 17-person lab at the University of Haifa’s Department of Marine Technologies, together with partners in Croatia, developed autonomous robotic floats that search for fish over a long time period.
“We also wanted to be a relatively cheap system so that these sensors could be used to cover large areas,” he says.
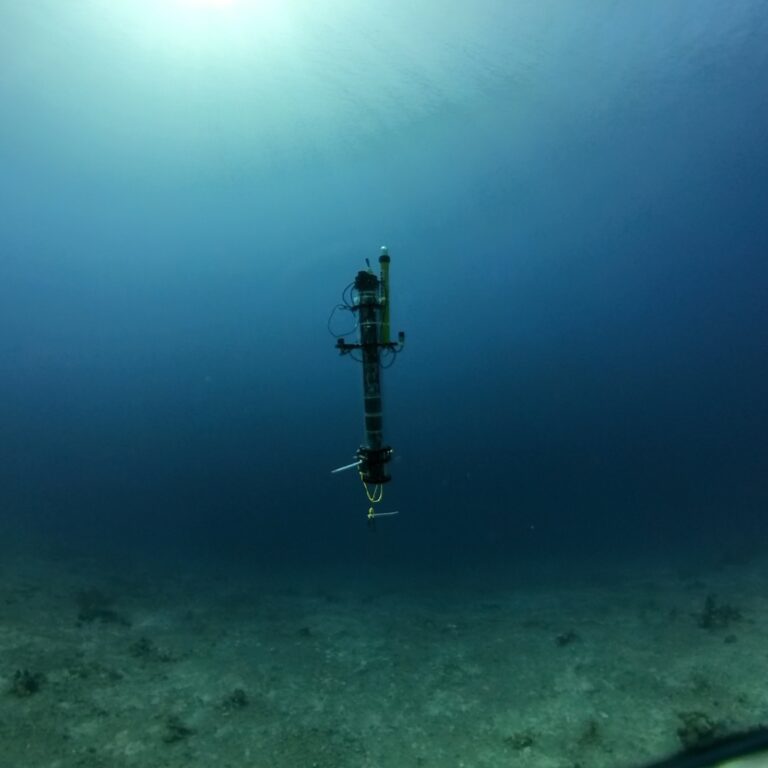
These underwater floats are carried by the currents and can control their depth, moving up and down in the water by altering their volume and therefore their buoyancy.
Their acoustic sensors absorb reflections from anything – from the seabed and from fish. Based on these reflections, an algorithm in the robot tries to understand its surroundings, says Diamant.
“This way, you can discover fish – its location and direction, its size and its style of movement — and understand whether this is the type of fish that you’re looking for.”
It’s possible to identify single fish or whole schools.

“Once fish are found, there are two operation options. The float either goes up and transmits the information to its operator via satellite communication, or it transmits it to other floats using underwater acoustic communication, which enables the floats to reach conclusions about the findings via consensus in order to reduce the number of false alarms,” Diamant notes.
Each robot can work continuously for five days. Then it floats back up and the operator can track it via GPS and pick it up.
Seeing what’s underneath
Diamant and his team recently tested their prototype in the deep water off the coast of the southern Israeli city of Eilat.
They plan on completing the prototype this year, building a commercial version next year and commercializing the technology the following year.
The target price is $1,000 per robot, which Diamant hopes is reasonable enough to enable deployments of multiple robots working together to cover a large area.
“Our end users are fishermen who could use it to locate the fish they’re looking for in way that’s more protective of the environment,” he notes. “Regulatory bodies can also use it to regulate the marine environment, and marine scientists could also use it to receive sea monitoring data.”
Finding fish using sonar, Diamant notes, is already possible, but not the way his device does it.
“Nowadays, the systems are aboard ships, and they can look down and see what’s underneath. We’re working with a different idea, which is to traverse the area and sample the marine environment at different depths and distances. We’re aiming for the robots to see 200 meters around and underneath them,” he says.
Saving energy
While developing this unique device, the team encountered two technological challenges – the first regarding energy and the second in differentiating fish from other objects.
“We’re aiming for five days of continuous activity, and that means these floats need to be energetically efficient, since you can’t load lots of batteries on these small devices,” Diamant says.
“We addressed this issue in two ways. One is giving the float efficient floating capabilities. The second is the acoustic monitoring. Each acoustic transmission in the water wastes quite a lot of energy, which is why we came up with the idea of having a discovery chain. There’s an initial identification, which happens once a minute and doesn’t require a lot of energy, just to check if something is moving in the sea toward the float. After we’ve confirmed that movement, we do a more detailed identification taking into account spatial elements to evaluate the size and characteristics of this moving target.”
In terms of identification, the problem is that any object can reflect back on the robot — a stone in the water, a plastic bag or even just waves. “The challenge is to separate between these reflections and the reflections we’re looking for from the fish,” says Diamant.
His lab is now looking at different applications for the technology – for example in the world of security and the identification of divers.
It is also working with the Israel Nature and Parks Authority on environmental projects such as monitoring sea turtles and dolphins to help ensure that passing ships don’t hurt them.
“Currently, this is done manually. There’s a scout on the deck who needs to look out for animals in the water. But clearly, this method has its limitations – you can’t see anything at night, the range isn’t big when facing the sun, and you can’t spot an animal if it’s not above the water,” says Diamant.
“The systems that we’re producing are definitely a future direction for this,” he concludes.
More on Earth










